工作原理
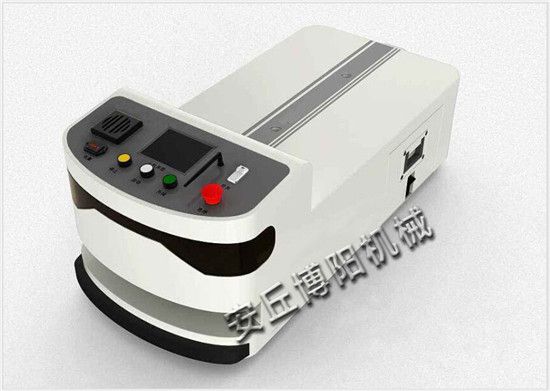
工作原理 在AGV車體上放置(zhì)托盤、料架、料箱等貨物進行搬運,或(huò)在AGV尾部牽引料車。由磁條導引AGV [1] 通過(guò)識別地標選擇目的地。背負牽引式AGV小車AGV運行穩定,最(zuì)小轉彎(wān)半徑300mm,停止精度±10mm,該車適用於運輸頻繁(fán)、物料供(gòng)應周期長的生產體係。
產品特點 1、單、雙、全向運行、體積小巧、搬運(yùn)靈活(huó)。
2、AGV小車(chē)多台AGV無人搬運車配合使(shǐ)用時可組成裝配(pèi)線,代替流水線(xiàn),形(xíng)成柔(róu)性生產係統。
3、AGV車(chē)體上(shàng)放置托盤、料架、料箱等貨物(wù)進行搬運,或在AGV尾部牽引料車。
4、背負式AGV小車最高速度可達(dá)近60米/秒,使零部件(jiàn)可快速、精確地運行(háng)。
應用行業 機械(xiè)加工、汽車製造、港口貨運、電(diàn)子產品裝配、造紙、發電廠、電子行(háng)業的超淨車間等諸多行業。
技(jì)術參(cān)數
工作(zuò)概述
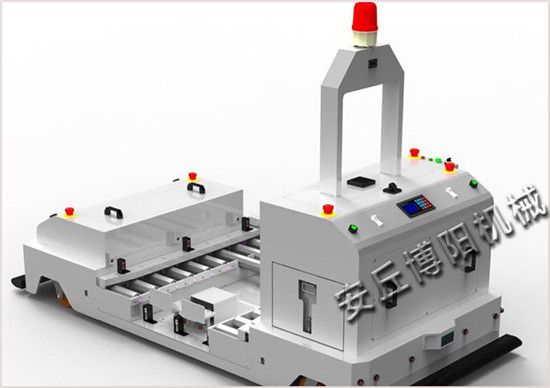
多站點背負式(shì)AGV是把料箱或物(wù)品放置於車(chē)體上,將物品對多個站點進行輸送。通過線路導引,通過磁條導引可以一點對(duì)多點的進行物料運輸。可通過呼叫係統選擇性的自動移載到(dào)站點。該車AGV運行穩定(dìng),最小轉彎半徑300mm,停止精度±10mm,該車適用於運輸頻繁(fán)、物料供應周期(qī)長的生產體係。



 0536-4387528
0536-4387528